RTK測位技術とは何か、そしてGEODNETはいかにしてセンチメートル級の測位精度を実現するのか?
高精度測位への需要は、自動運転、ドローン、ロボティクス、デジタルツイン技術の進歩に伴い急速に高まっています。従来のGPSナビゲーションは日常的な用途には十分ですが、自動化アプリケーションではメートル単位の誤差が課題となるケースが少なくありません。そのため、センチメートルレベルの精度を実現するRTK技術が、スマートデバイスに不可欠なインフラとして急速に普及しつつあります。
高精度測位業界において、RTKは測量、農業の自動化、産業用ロボティクス、自動運転システムの中核技術として確立されています。GEODNETは、分散型インフラモデルを活用してRTKサービスを地域ネットワークからグローバル規模へ拡大し、より幅広いデバイスとデベロッパーに高精度測位を提供しています。
RTK測位技術とは
RTK(リアルタイムキネマティック)は、衛星航法信号の搬送波位相を測定することで高精度測位を実現する技術です。
標準的なGNSS受信機は、通常、衛星からの放送信号を直接処理して位置を計算し、その精度は数メートル程度です。一方、RTKは固定の基準局を設置し、誤差をリアルタイムに計算して補正データを移動端末に送信することで、測位精度を大幅に向上させます。
測位誤差をメートル単位からセンチメートル単位に低減できることから、RTKは高精度なナビゲーションや測量が求められる現場で広く採用されています。
標準的なGPSに測位誤差が生じる理由
標準的なGPSの測位誤差は、複数の要因が複合的に作用して発生します。
衛星軌道誤差
衛星は運用中に軌道が変動することがあり、その結果、位置計算に誤差が生じます。
電離圏・対流圏遅延
衛星信号が大気を通過する際、電離圏と対流圏の影響で伝搬速度が変化します。
マルチパス効果
建物や山、地面などで反射した信号が受信機に届くと、測定値が実際の位置からずれることがあります。
受信機誤差
デバイスごとにハードウェア性能やアルゴリズムの能力が異なることも、最終的な測位結果に影響を及ぼします。
これらの誤差が積み重なることで、標準的なGPSの精度は通常、数メートルの範囲にとどまります。
RTKはどのようにセンチメートルレベルの測位を実現するか
RTKの中核は、基準局によるリアルタイムの誤差補正です。
基準局は正確に測定された座標に設置され、受信した衛星信号と理論値との差を高精度に計算します。この差は補正データに変換され、ネットワークを通じて近隣のモバイルデバイスに送信されます。モバイルデバイスは衛星信号を受信しながら、この補正データも同時に受信することで、ほとんどの誤差を除去し、センチメートルレベルの精度を達成します。
この処理は通常数秒以内で完了するため、「リアルタイムキネマティック測位」と呼ばれています。
GNSS、GPS、RTKの違いは何か
多くのユーザーはGNSS、GPS、RTKを混同しますが、これらは異なる概念レベルに位置づけられます。
GNSSは全球測位衛星システム
GNSS(Global Navigation Satellite System)は、あらゆる全球測位衛星システムを包括する総称です。
現在の主なシステムは以下の通りです。
- GPS(米国)
- GLONASS(ロシア)
- Galileo(欧州連合)
- BeiDou(中国)
GPSはGNSSの一部
GPSは最も初期に開発され、現在も最も広く利用されている衛星航法システムの1つです。
日常的には「GPSナビゲーション」と呼ばれることが多いですが、実際には複数のGNSSシステムからの信号を受信しているデバイスもあります。
RTKは高精度測位技術
RTKは衛星システムではなく、GNSS信号を基に誤差補正を行う測位手法です。
つまり、GNSSが衛星信号を提供し、GPSはそのGNSSシステムの1つであり、RTKはそれらの信号を利用してセンチメートルレベルの測位を実現する技術です。
RTKネットワークはどのようなコンポーネントで構成されるか
完全なRTKシステムは、通常、いくつかのコンポーネントが連携して動作します。
基準局
基準局は衛星信号を継続的に受信し、誤差を計算します。
補正データサーバー
サーバーは基準局のデータを処理し、標準化された補正情報を生成します。
通信ネットワーク
インターネットまたは無線通信システムが補正データを端末デバイスに伝送します。
移動局端末
移動局(ローバー)は測位サービスを利用するデバイスで、ドローン、ロボット、自動運転車などが該当します。
これらのコンポーネントが連携して、RTK測位サービスのアーキテクチャを構成します。
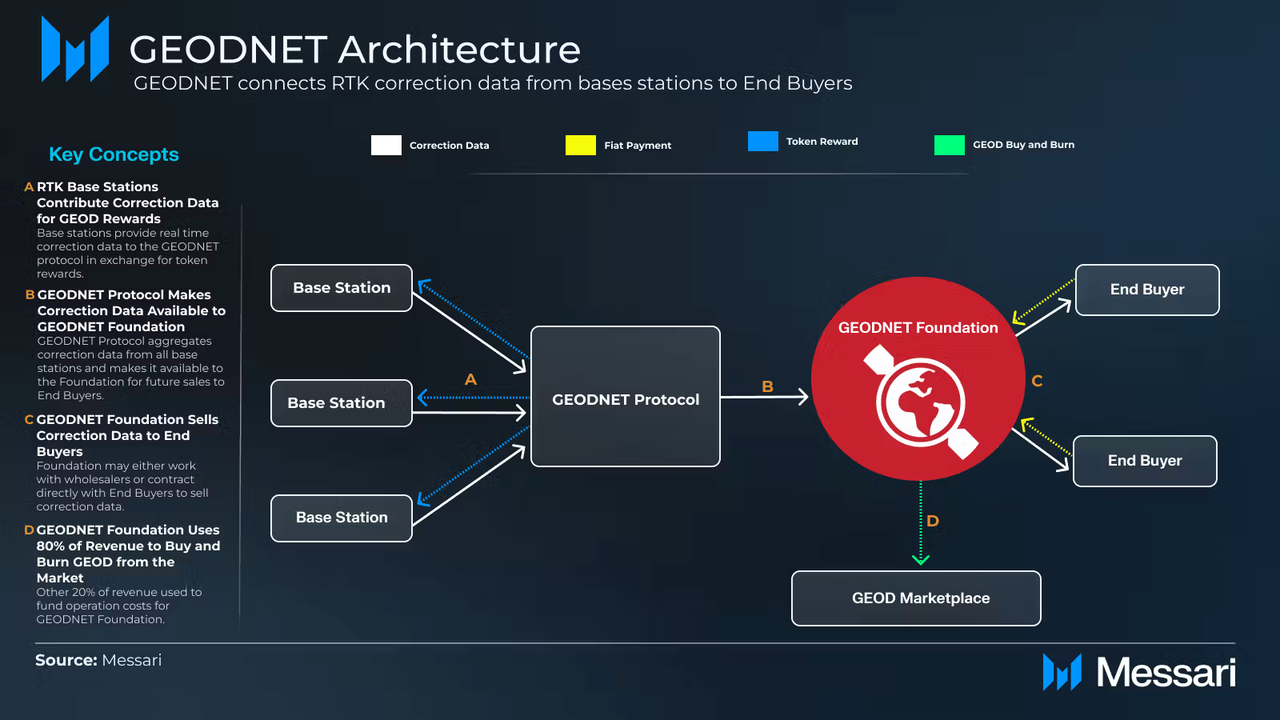
GEODNETはどのように分散型RTKネットワークを構築するか
GEODNETは、従来のRTKネットワークとDePINモデルを融合し、グローバルな高精度測位インフラを実現しています。GEODNETでは、集中型事業者が基準局を設置する方式ではなく、世界中のユーザーが自らGNSS基準局を展開し、ネットワークに接続できる仕組みを採用しています。ノード運営者は、高品質な測位データを提供することでGEODトークンの報酬を得られ、これがネットワークの継続的な成長を促進します。
このモデルはインフラコストを抑えつつ、カバレッジと拡張効率を向上させます。ノード数が増えるほど、GEODNETはより多くの地域に高精度測位サービスを提供できるようになります。
GEODNETにおける単一のRTK測位プロセスはどのように機能するか
GEODNETを理解するには、具体的な測位の流れを追ってみるとよいでしょう。
ステップ1:基準局が衛星信号を受信
GEODNETのノードは、複数のGNSSシステムからの信号を常時受信します。
ステップ2:リアルタイム誤差を計算
基準局は、あらかじめ把握している正確な座標を基に、現在の衛星信号の誤差を計算します。
ステップ3:補正データを生成
システムは誤差を標準的なRTK補正情報に変換します。
ステップ4:端末デバイスに送信
補正データはインターネット経由でドローン、ロボット、車両などに送信されます。
ステップ5:端末が測位補正を完了
デバイスは補正データを使って衛星信号を補正し、センチメートルレベルの測位を実現します。
この一連の処理はリアルタイムで継続的に実行されます。
RTK技術を主に使用する業界は
高精度測位は、多くの業界におけるデジタルトランスフォーメーションの基盤インフラとして重要な役割を果たしています。
自動運転
自動運転車両は、経路計画や車線検出にセンチメートル単位の測位を必要とします。
ドローン測量
測量用ドローンは、RTKを活用して地図や3Dモデルの精度を高めています。
スマート農業
自動運転トラクターや精密播種機は、圃場作業に高精度なナビゲーションを必要とします。
産業用ロボット
自律移動ロボットは、経路制御や協調作業に正確な測位が不可欠です。
空間コンピューティング
拡張現実(AR)やデジタルツインのシステムは、正確な位置データをもとに現実に即した空間モデルを構築します。
RTK技術が直面する課題は何か
高い精度を誇るRTKですが、実際の運用にはいくつかの制約があります。
まず、基準局の密度が測位性能に直接的な影響を与えます。次に、ネットワーク通信の遅延が補正データの即時性を損なう可能性があります。さらに、複雑な都市環境では建物による遮蔽やマルチパス効果が測位品質を低下させることがあります。マルチ周波数GNSS技術の進歩や世界中の基準局ネットワークの拡大により、これらの課題は徐々に解決されつつあります。
まとめ
RTKは、現在最も広く実用化されている高精度測位技術の1つです。衛星信号の誤差をリアルタイムで補正することで、標準的なGNSSの精度をメートル単位からセンチメートル単位へと引き上げます。自動運転、ドローン、ロボティクス、スマート農業の発展に伴い、RTKは現実世界のスマートデバイスにとって不可欠な基盤技術となっています。
GEODNETはRTK技術とDePINモデルを組み合わせ、世界中に分散配置された基準局ネットワークを通じて高精度測位サービスを提供しています。従来の中央集権型RTKネットワークとは異なり、GEODNETはコミュニティ主導のアプローチでインフラを拡大し、より幅広い用途で高精度測位を利用できる環境を整えています。
よくある質問
RTK測位技術とは何ですか?
RTK(リアルタイムキネマティック)は、基準局を使って衛星信号の誤差をリアルタイムに補正し、センチメートルレベルの測位精度を実現する高精度ナビゲーション技術です。
RTKとGPSの違いは何ですか?
GPSは衛星航法システムですが、RTKはGPSや他のGNSS信号を利用して誤差補正を行う測位技術です。標準的なGPSの精度は数メートル程度であるのに対し、RTKはセンチメートル単位の精度を達成します。
RTKはなぜ標準的なGPSよりも精度が高いのですか?
RTKは基準局を使用して誤差補正をリアルタイムに計算・送信するため、衛星軌道誤差や大気遅延といった主要な誤差要因を排除でき、結果として大幅に高い精度を実現します。
GEODNETはどの測位技術を使用していますか?
GEODNETは主にGNSSとRTK技術を基盤としており、世界中に配置された基準局ネットワークを通じてリアルタイムの測位補正を提供し、センチメートルレベルのナビゲーションを実現します。
GEODNETと従来のRTKネットワークの違いは何ですか?
GEODNETはDePINモデルを採用し、グローバルコミュニティが共同で基準局を展開し、トークンインセンティブを受け取ります。一方、従来のRTKネットワークは通常、政府機関や事業者によって中央集権的に構築・運用されています。
RTK測位が必要なデバイスはどれですか?
ドローン、自動運転車両、農業機械、産業用ロボット、測量機器、一部のAR端末や空間コンピューティングデバイスは、RTKが提供する高精度測位機能を必要としています。
共有
内容


関連記事

ONDOトークン経済モデル:プラットフォームの成長とユーザーエンゲージメントをどのように推進するのか
Render、io.net、Akash:DePINハッシュレートネットワークの比較分析
AI分野におけるRenderの申請理由:分散型ハッシュレートが人工知能の発展を支える仕組み
SentioとThe Graph:リアルタイムインデックス機構とサブグラフインデックス機構の比較
STトークンのユースケースとは?Sentioエコシステムにおけるインセンティブメカニズムを詳しく解説