Stage 2: Native Excellence & Cultural Adaptation
Com a transição da tecnologia de IA do ambiente digital para o mundo físico, robôs, dispositivos autônomos e sistemas automatizados tornam-se componentes essenciais da infraestrutura de IA de próxima geração. Da robótica humanóide às máquinas autônomas, um número crescente de sistemas de IA já conta com capacidade de atuação no mundo real, atraindo cada vez mais atenção de capital e tecnologia para a economia robótica.
No entanto, a indústria robótica tradicional enfrenta há muito tempo barreiras elevadas de financiamento, centralização de capital e baixa liquidez. Equipamentos robóticos são tipicamente negócios de ativos pesados, com ciclos longos de P&D e altos custos de implantação, o que dificulta a participação direta de usuários comuns no crescimento do setor. O RCM foi criado justamente para enfrentar esse desafio, apoiando-se na infraestrutura Web3.
O que são os mercados de capitais robóticos
Proposto pela XMAQUINA como um mecanismo de coordenação de capital on-chain para a economia robótica, os Mercados de Capitais Robóticos (RCM) visam governar, financiar e alocar recursos para ativos robóticos e infraestrutura automatizada dentro de uma rede aberta.
Enquanto os mercados de capitais tradicionais atendem ações, títulos e financiamento corporativo, o RCM transfere parte da lógica de capital da indústria robótica para um ambiente on-chain. Seu propósito central não é simplesmente "negociar ativos robóticos", mas sim construir uma nova estrutura colaborativa em torno da economia robótica.
O RCM normalmente envolve:
- Equipamentos robóticos
- Infraestrutura automatizada
- Máquinas autônomas
- Sistemas de hardware impulsionados por IA
- Redes de IA física
- Tesouraria e estruturas de governança relacionadas a robôs
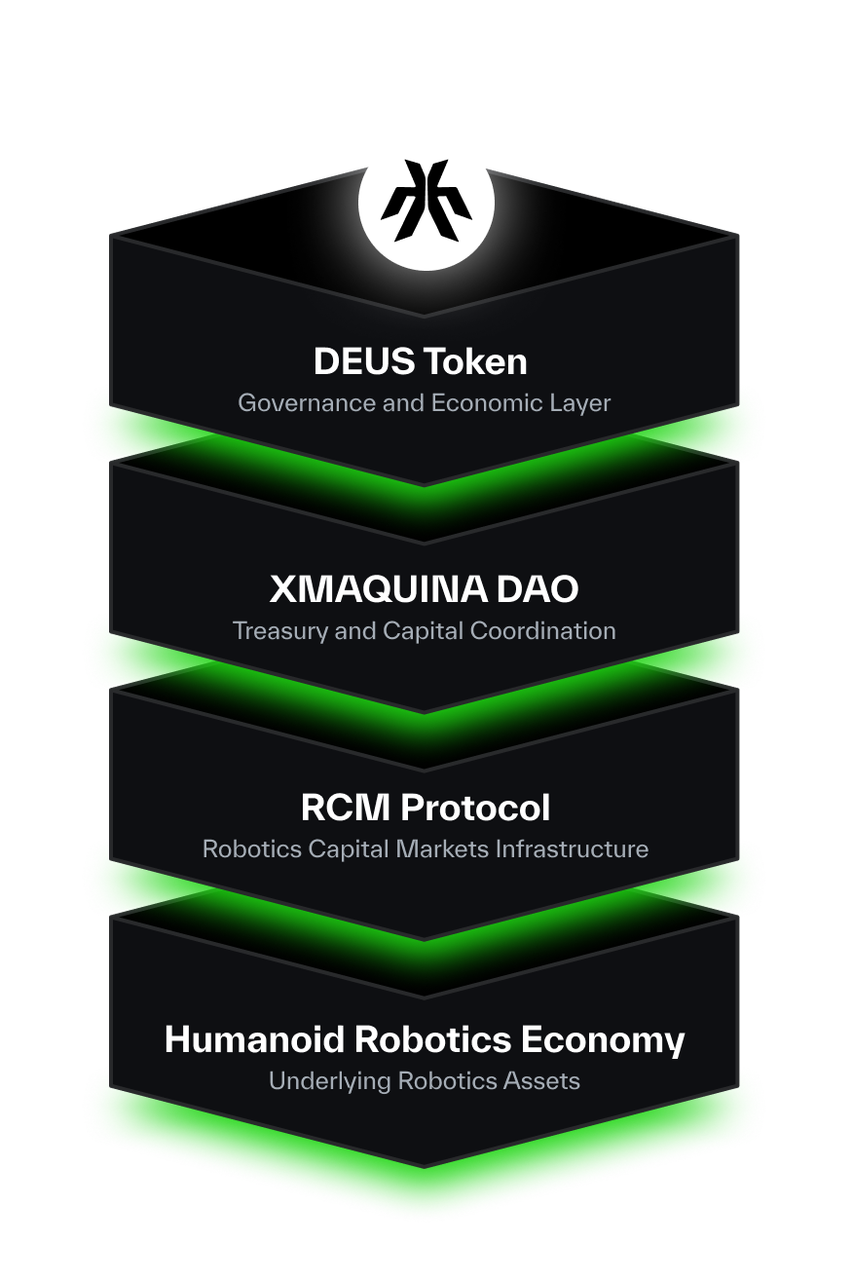
No ecossistema XMAQUINA, o RCM funciona como um módulo essencial que conecta a governança DAO, os ativos robóticos e o capital on-chain.
Por que a indústria robótica precisa de mercados de capitais on-chain
Ao contrário do setor tradicional de internet, a indústria robótica exige investimentos pesados em hardware e capital de longo prazo para P&D e operações.
Por exemplo:
- Robôs humanóides requerem fabricação complexa de hardware
- Sistemas automatizados precisam de manutenção contínua
- A robótica com IA envolve alta taxa de hash e custos elevados com equipamentos
- Máquinas autônomas necessitam de atualizações e implantações constantes
A indústria robótica tradicional costuma depender de capital de risco, financiamento corporativo e capital institucional, mas esse modelo apresenta diversas desvantagens claras:
| Problema |
Impacto |
| Altas barreiras de financiamento |
Usuários comuns não conseguem participar facilmente |
| Baixa liquidez |
Ativos robóticos são difíceis de negociar |
| Centralização de capital |
O poder de decisão fica concentrado em poucas instituições |
| Eficiência de colaboração limitada |
Ecossistemas abertos têm dificuldade de se formar |
O RCM resolve esses problemas com governança on-chain e coordenação DAO, reduzindo as barreiras de participação e criando uma estrutura de capital mais aberta para a economia robótica.
Como o RCM traz ativos robóticos para on-chain
Levar ativos robóticos para on-chain vai muito além de "emitir tokens". A abordagem utiliza governança on-chain, mapeamento de ativos e coordenação de capital para que parte dos recursos da economia robótica colabore dentro da rede Web3.
O RCM normalmente é composto por vários elementos centrais:
Estrutura de governança DAO
A DAO coordena a governança e a tomada de decisões na economia robótica, incluindo gestão de tesouraria, atualizações de protocolo e alocação de recursos.
Na XMAQUINA, DEUS e xDEUS são usados para governança e votação.
Mecanismo de coordenação de ativos
Como os ativos robóticos geralmente possuem atributos do mundo real, protocolos on-chain são necessários para estabelecer a lógica de governança e coordenação.
Esse processo pode incluir:
- Mapeamento de ativos
- Coordenação de rendimento
- Gestão de tesouraria
- Alocação de capital
- Colaboração SubDAO
Mecanismo de financiamento on-chain
O RCM busca criar um novo modelo de financiamento para a economia robótica por meio de governança comunitária e uma estrutura de capital aberta.
Diferentemente do financiamento privado tradicional, a governança on-chain enfatiza a participação da comunidade e a colaboração transparente.
Infraestrutura física de IA
O RCM não trata apenas dos aspectos financeiros, mas também da infraestrutura subjacente de robôs e IA.
Como o RCM difere do RWA tradicional
O RCM compartilha algumas semelhanças com os Ativos do Mundo Real (RWA), pois ambos combinam recursos do mundo real com estruturas on-chain.
No entanto, seus focos são bastante distintos:
| Dimensão |
RCM |
RWA Tradicional |
| Objeto central |
Robôs e IA física |
Imóveis, títulos, etc. |
| Modelo de governança |
Orientado por DAO |
Mapeamento de ativos financeiros |
| Atributo do ativo |
Infraestrutura dinâmica |
Ativos financeiros estáticos |
| Objetivo |
Colaboração da economia de máquinas |
Liquidez de ativos financeiros |
| Estrutura de rede |
Redes autônomas |
Estrutura de produtos financeiros |
O RWA tradicional foca na representação on-chain de ativos financeiros, enquanto o RCM enfatiza colaboração, governança e expansão da infraestrutura dentro da economia robótica.
Como o RCM difere dos modelos tradicionais de financiamento robótico
A indústria robótica tradicional depende de financiamento por capital próprio, investimento de venture capital ou capital corporativo.
O RCM busca estabelecer uma lógica de colaboração diferente, usando DAOs e estruturas de capital on-chain.
As principais diferenças incluem:
| Dimensão |
RCM |
Financiamento Robótico Tradicional |
| Método de participação |
Governança DAO |
Investimento institucional |
| Estrutura de capital |
Rede on-chain aberta |
Capital privado |
| Liquidez |
Mais alta |
Mais baixa |
| Método de governança |
Colaboração comunitária |
Decisão corporativa |
| Acessibilidade |
Mais aberta |
Barreira de entrada mais alta |
Esse modelo não substitui o financiamento tradicional, mas explora novas formas de coordenação de capital na economia robótica.
Qual é o papel do DEUS no RCM?
DEUS é o token de governança do ecossistema XMAQUINA e uma ferramenta essencial de coordenação dentro da estrutura do RCM.
Suas principais funções incluem:
- Governança DAO
- Gestão de tesouraria
- Votação de propostas
- Coordenação SubDAO
- Alocação de recursos do ecossistema
Os usuários podem fazer stake de DEUS para obter xDEUS e participar da governança.
Esse mecanismo transforma o RCM de um mero mercado de ativos em uma rede de governança centrada na economia robótica.
Quais desafios potenciais o RCM enfrenta?
Embora o RCM ofereça uma abordagem inovadora para levar a economia robótica para on-chain, essa direção ainda está em estágio inicial.
Os desafios potenciais incluem:
- Complexidade na avaliação de ativos robóticos
- Grande dificuldade em governar ativos do mundo real
- Imaturidade da indústria de IA física
- Incerteza quanto à eficiência da coordenação DAO
- Estruturas regulatórias e de compliance ainda em desenvolvimento
Além disso, a própria indústria robótica tem altas barreiras técnicas e exige investimento de longo prazo. Por isso, o desenvolvimento do RCM está diretamente ligado à maturidade geral do setor de IA física.
Resumo
Os Mercados de Capitais Robóticos (RCM) são um mecanismo de mercado de capitais on-chain construído em torno da economia robótica e da IA física. Por meio de DAOs, tokenização e governança on-chain, eles criam novos modelos de financiamento e colaboração para ativos robóticos e infraestrutura automatizada.
Comparado ao financiamento robótico tradicional, o RCM enfatiza participação aberta, governança comunitária e coordenação de capital on-chain. Seu objetivo não é apenas melhorar a liquidez dos ativos robóticos, mas também impulsionar a economia de máquinas rumo a uma evolução em rede aberta.
Perguntas frequentes
Qual é a diferença entre RCM e RWA tradicional?
O RWA tradicional foca em trazer ativos financeiros para on-chain, enquanto o RCM se concentra na colaboração de governança para ativos robóticos, IA física e a economia de máquinas.
Por que a indústria robótica precisa de mercados de capitais on-chain?
A indústria robótica frequentemente enfrenta altas barreiras de financiamento, baixa liquidez e centralização de capital. Mercados de capitais on-chain oferecem uma estrutura de colaboração mais aberta.
Qual é o papel do DEUS no RCM?
DEUS é o token de governança da XMAQUINA, usado para votação DAO, gestão de tesouraria e coordenação de recursos do ecossistema.
O que é IA física?
IA física refere-se a sistemas de IA capazes de interagir com o mundo físico, incluindo robôs, dispositivos autônomos e máquinas automatizadas.
O RCM pertence ao DePIN?
RCM e DePIN compartilham alguns pontos em comum, mas o RCM é mais focado em mercados de capitais robóticos e governança da economia de máquinas, enquanto o DePIN enfatiza redes de infraestrutura.